Self-sustainable Lane and Blind Spot Detection Systems with Wind Energy Harvesters
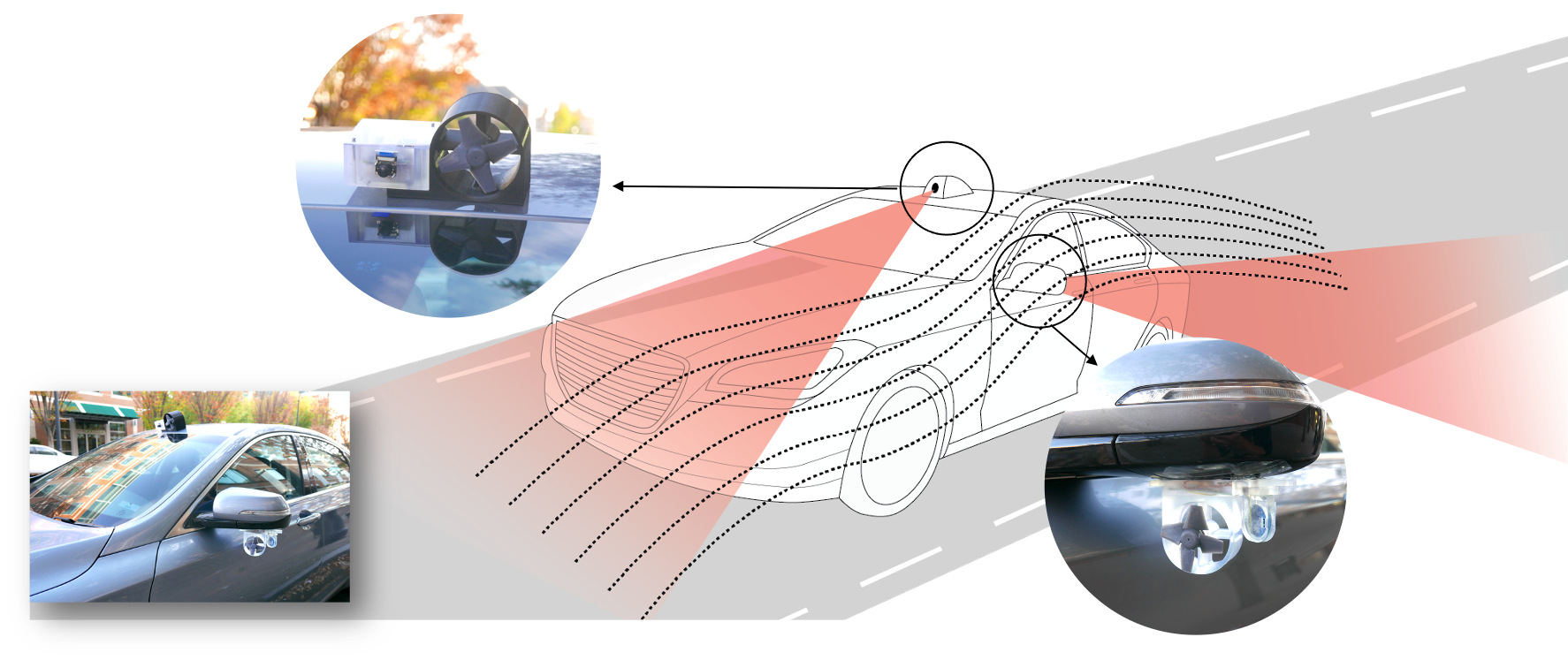
Automobiles offer unique opportunities of energy harvesting to support application of new driver assistance technologies to existing passenger vehicles. In this research, we have demonstrated compute-proximal energy harvesting for self-sustained automobile sensing systems with inch-scale wind energy harvesting.
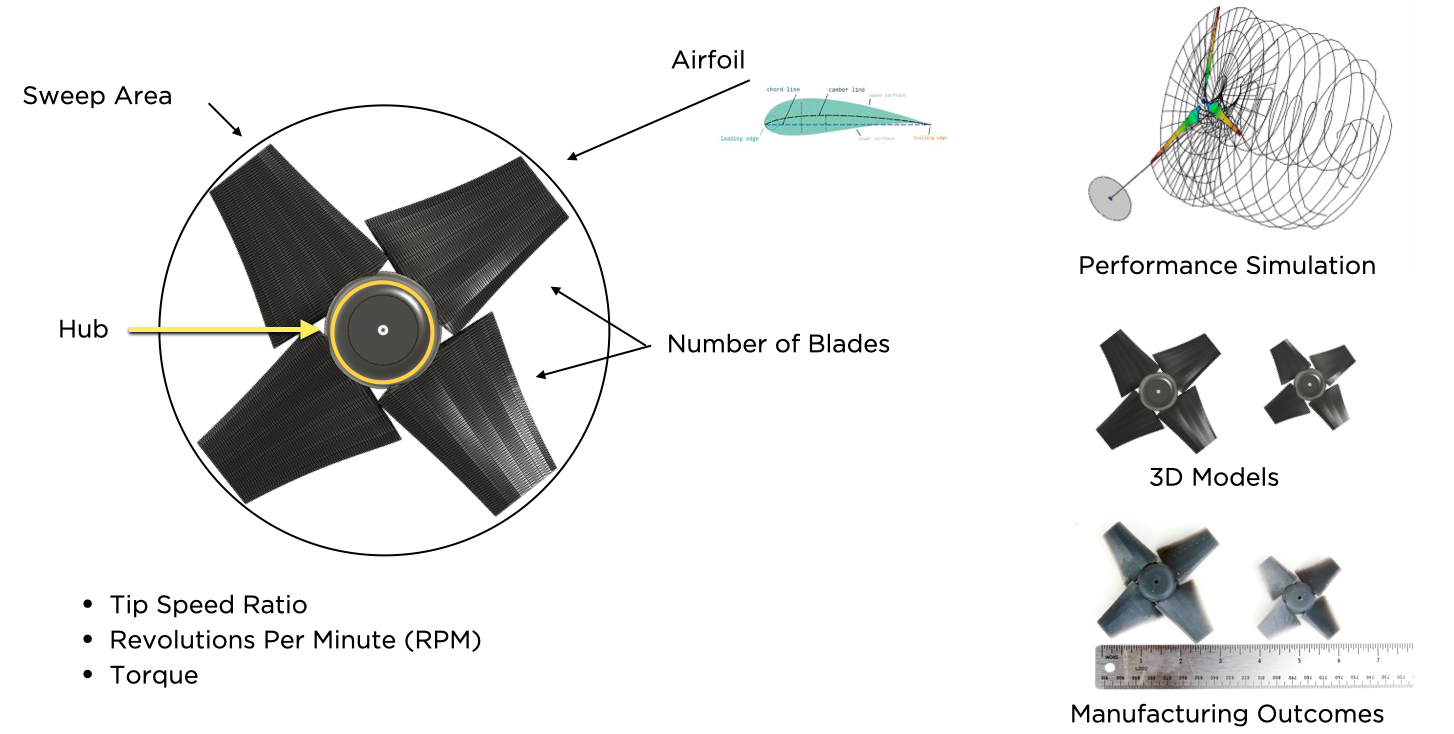
As a first step, we investigated the design space of small-scale wind turbines for automobiles. We then designed two wind energy harvesters — 63 and 92 mm diameter — with optimized rotors and achieved 20.6% and 16.2% power conversion efficiency, respectively.
With the harvested energy, we then demonstrated two advanced safety sensing systems — a blind spot monitoring system using a novel low-power radar sensor that achieved around 90% accuracy, and a lane detection system using an off-the-shelf camera sensor and embedded platform that achieved above 90% accuracy, in city and highway driving conditions.
Pulsed Coherent Radar(PCR) Sensor for Blind Spot Detection

We conducted three-stage experiments, systemically. First, we examined the range of the distance where the PCR sensor can detect the car's presence in the controlled setup. Second, we test if the presence of a car moving at different speed levels can be detected within the range that we learned from the first experiment in a controlled setup. Lastly, we assess whether the sensor configuration that we obtained from the first two controlled experiments can accurately detect a car's presence in a real driving scenario.
Camera Sensor System for Lane Detection
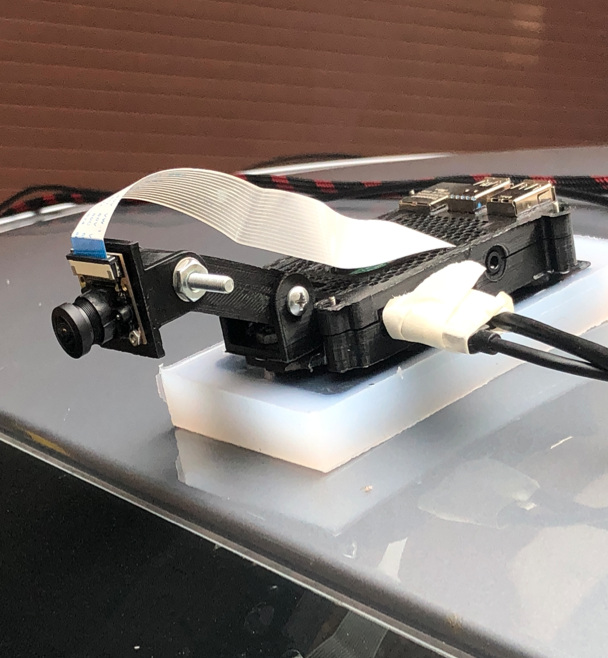
We developed a lane detection system comprised of a Raspberry Pi 4 (1.5GHz CPU, 8 GB Memory) and a camera sensor (5 Megapixels OV5647) with a 160-degree fish-eye lens. The system captures images at 640 x 480 resolution, then applies lane detection algorithms to extract lane keeping information in real-time. The extracted information can be communicated via Bluetooth LE to a driver's smartphone or a dedicated display inside an automobile.
Integration of the Two Sensor Systems with Small-scale Wind Energy Harvesters
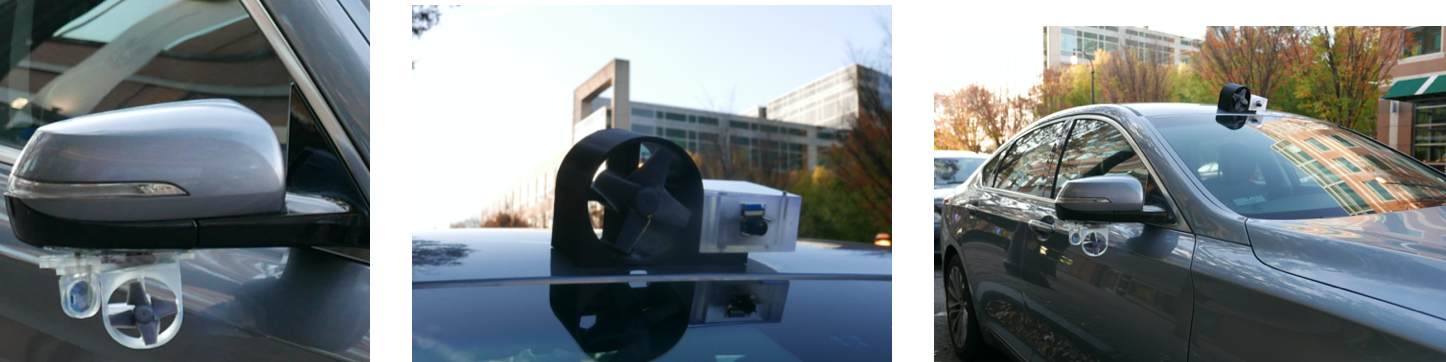
Installation Examples